
Système robotique adaptatif et autonome pour l’environnement
Le projet Adap2E est un projet jeune chercheur, soutenu par l’ANR (Agence Nationale de Recherche) et labellisé par le pôle de compétitivité Viameca est un projet jeune chercheur.
|
Fiche d’identité du projet ADAP2E
|

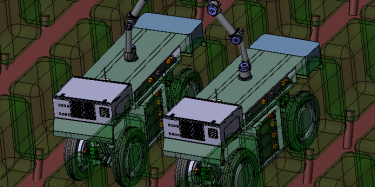
Robots Adap2E en association pour la pulvérisation de précision
Pouvoir s’adapter à son environnement et à sa mission pour accroître son autonomie et sa sécurité.
Les activités humaines relatives aux milieux naturels, comme l’agriculture ou la défense, se révèlent bien souvent difficiles, pénibles, voire dangereuses, tout en nécessitant un haut niveau de précision. Aussi, l’utilisation de robots se révèle une alternative intéressante à la mobilisation de personnes pour éviter leur exposition à différents types de risques. Néanmoins, la diversité des tâches à effectuer, conjuguée à la grande variabilité des conditions d’évolution (type de sol, géométrie du terrain, conditions climatiques), rend difficile la robotisation. En effet, contrairement au contexte industriel ou routier, les conditions sont difficilement maîtrisables en milieux naturels. Aussi, l’utilisation d’une architecture robotique simple et figée apparaît rapidement limité.
L’objectif du projet Adap2E consiste ainsi à substituer à un robot, dont les caractéristiques sont constantes, un système robotique capable de se reconfigurer à la fois mécaniquement et algorithmiquement pour s’adapter à l’environnement et à sa mission. Il s’agit ainsi de concevoir un outil agile et autonome, capable de modifier sa forme et son comportement au gré des contraintes inhérentes à son travail.
Développer et sélectionner des comportements élémentaires pour s’adapter à l’environnement en associant, si besoin, plusieurs robots.
Afin de faire face à la multitude des missions et les variabilités inhérentes aux différents contextes d’évolution, une approche générique de reconfiguration robotique a été développée. Celle-ci se comprend d’un point de vue mécanique (changement des propriétés mécanique du système robotique), comme d’un point de vue algorithmique (changement de comportement robotique). Tout d’abord, afin d’adapter les propriétés physiques du système robotique, les méthodologies d’innovation ont montré que la meilleure approche pour adapter les paramètres mécaniques d’un robot (tels que la voie, l’empattement ou encore la garde au sol) résidait dans l’association de plusieurs robots élémentaires. Ce point de vue a imposé d’une part la conception de robots spécifiques, et d’autre part le développement d’un comportement assurant l’asservissement relatif de plusieurs robots en formation resserrée. Ce comportement s’ajoute aux nombreux autres modes de navigations élémentaires développés dans le projet (12 au total), qu’il convient de sélectionner en fonction de la mission. Quatre scénarios ont été considérés durant le projet pour valider cette sélection en ligne basée sur les principes de vérification de modèle et des techniques de planification.
Résultats majeurs du projet
Le projet a débouché sur la conception de 2 robots capables de s’associer et de sélectionner ou juxtaposer les 12 comportements élémentaires développés durant le projet pour réaliser des missions complexes. Quatre scénarios agricoles ont notamment été mis en œuvre, en privilégiant le domaine de la pulvérisation en viticulture compte-tenu de l’exposition à différents risques pour l’Homme, et de la diversité des parcelles. Cette technologie a fait l’objet de plusieurs démonstrations, montrant l’intérêt sociétal de la robotique en agriculture, et ouvre la voie à plusieurs applications. Aussi plusieurs retombées mèneront par l’intermédiaire de transfert à des versions commerciales (projet FUI PumAgri[1]), ou a des innovations pour la sûreté des agriculteurs (en lien avec la CCMSA), ou seront appliqués au domaine militaire (projet DGA Furious). Les résultats obtenus montrent l’intérêt de travailler à présent sur l’intelligence artificielle pour les processus de décision de haut niveau, ainsi que sur l’interaction avec les outils embarqués sur les robots.
Production scientifique
Ce projet a permis de développer des approches robotiques originales, de part les comportements élémentaires, mais également sur l’adaptation d’un système robotique a son environnement, que celle-ci soit mécanique ou algorithmique. Aussi, 3 revues internationales et 13 conférences internationales ont pu être publiées. En outre, l’intérêt croissant pour le domaine de le robotique en agriculture a amené l’invitation à 2 conférences internationales et une nationale. Les nombreuses démonstrations ont donné lieu à une couverture médiatique importante, puisque 15 citations dans différents médias ont été relevées. Enfin, la dynamique d’équipe initiée par le projet a amené celle-ci à être à l’origine d’une association nationale de robotique agricole[2], aujourd’hui relayée au niveau européen.
[1] http://www.sitia.fr/innovation-robotique/plateforme-pumagri/
[2] RobAgri, créée en octobre 2017 et comptant 61 membres (constructeurs et start’ups, équipementiers, laboratoires, pôles de compétitivité, Instituts techniques, …














Commentaires récents