
Le projet Adap2E a été lancé mi-novembre 2014 pour une durée de 42 mois.
Il s’articule autours de plusieurs axes (plate-forme mécanique, perception & commande, décision & reconfiguration) et comporte plusieurs phases :
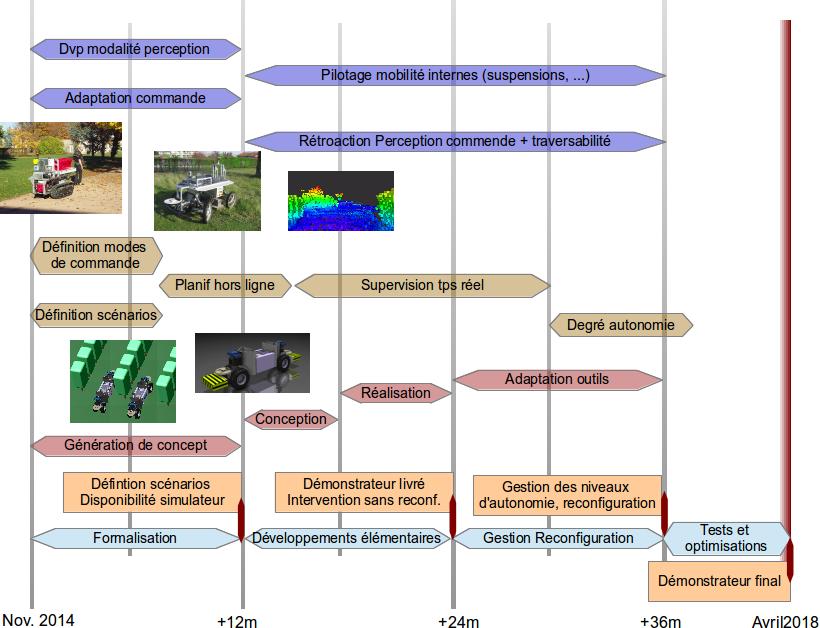
2014 à 2016 : Définition des scénarios de validation, la conception de la partie mécanique, et le développement des commandes élémentaires. Permet de définir les modes de fonctionnement adaptés aux différentes opérations considérées dans le projet. Les spécificités demandées au robot reconfigurable dans le cas d’application privilégiée du projet (viticulture), en recensant l’ensemble des configurations possible de plantation dans les différents types de vignoble.
2017 : Le processus de conception suivi durant le projet, amenant à considérer un système multi-robot. La démarche de conception décrite a permis d’aboutir au cahier des charges de chacun des robots, qui n’ont pu être réalisé par sous-traitance comme initialement prévu. En effet, le marché publié a été infructueux que ce soit pour des problèmes de coût ou de non conformité au cahier des charges. Aussi, la conception et la réalisation (approvisionnement, fabrication, montage et câblage) ont été entièrement réalisés par l’équipe
de recherche bénéficiant pour la conception et le suivi d’une ressource humaine supplémentaire d’Irstea.
2018 : Les solutions de conception on un aboutit à la réalisation de 2 robots équipés de 4 moteurs-roues et de 4 roues directrices indépendantes, autorisant une grande manoeuvrabilité et la réalisation de demi tour sur place. Pour limiter les problèmes de roulis durant les démonstrations, la conception du second robot a une voie plus large de 10 cm.
2019 : Les démonstrations de coopération avec les robots ont débutés en février 2019. Phase de tests et d’optimisation, démonstration finale en avril.










Commentaires récents