
Afin de proposer un système robotique agile, capable d’effectuer de façon autonome une opération complexe, en s’adaptant à la diversité des situations rencontrées en milieux naturels, le projet Adap2E s’est décomposé autour de 3 axes, schématisés sur la figure ci-contre :
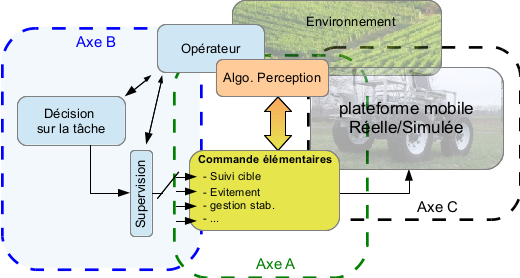
Développement de lois de commande pour la mobilité, et l’intégrité.
Cet axe est focalisé sur la génération de lois de commande élémentaires pour l’autonomie complète ou partielle d’engins tout-terrains. En fonction de l’état de la machine, des performances du système de perception, de la nature de la tâche, et du niveau d’interaction envisagé, plusieurs approches ont été considérées, en se basant sur la réalisation de 4 scénarios types d’interventions en milieux naturels, avec une connotation agronomique forte :
- Scénario S1 : Assistance à un opérateur humain pour une intervention dans une parcelle. Le robot suit un opérateur à l’aide d’un capteur laser ou lidar y compris dans une parcelle avec la végétation, avec des zones de masquage entre l’opérateur et le robot (branche, hautes herbes) nécessitant que le robot avance en poussant des obstacles.
- Scénario S2 : Réalisation d’une tâche agronomique. Le robot suit une trajectoire planifiée à haute vitesse pour rejoindre une parcelle (potentiellement par GPS). Dans la parcelle, il réalise un suivi de rang par laser horizontal, incliné (suivi d’empreinte) ou par vision pour réaliser l’opération, nécessitant d’enjamber la végétation (et donc de changer sa voie et sa garde au sol). A la fin d’un rang il panifie, un demi-tour, change de rang, jusqu’à la fin de la parcelle. Il revient ensuite à une position de référence dans les mêmes conditions qu’à l’allée.
- Scénario S3 : Monitoring de parcelle. Ce scénario reprend le même scénario que S2, mais en restant entre les rangs (sans les enjamber), et est confronté à des risques de renversement (évolution en dévers).
- Scénario S4 : Transport de matériel autonome vers une parcelle. Il s’agit ici de se déplacer à haute vitesse (30 km/H) sur un sol potentiellement irrégulier et comportant le passage d’obstacles.
Pour réaliser ces scénarios types, 10 modes de commande élémentaires ont été envisagés, conjugués à 7 modes de perception, suivant le tableau suivant :
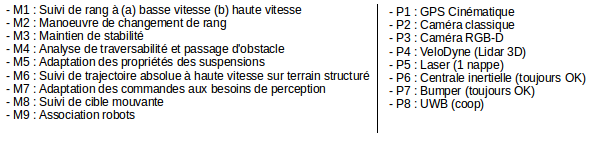
Modes de commande et perception développés durant le projet
A partir de ces modes de perception et de commande, plusieurs comportements peuvent être définis comme un couple (Mx,Py). La planification, la sélection et l’enchaînement de ces comportements permet de réaliser les différents scénarios identifiés et au-delà de couvrir une partie importante des interventions à réaliser de manière autonome par un robot reconfigurable. Plusieurs techniques de commande avancées [7] pour garantir la robustesse et la précision de chaque comportement, comme les principes adaptatifs, prédictifs, et backstepping, explicités dans la partie résultat.
Pondération, sélection des modes de navigation et du niveau d’autonomie.
Cet axe est focalisé sur les aspects de décision de haut niveau, en s’appuyant notamment sur la prise en compte du niveau d’interaction entre l’homme et la machine, de la nature de la tâche et du contexte opérationnel de celle-ci. Des algorithmes de décision agissant à plusieurs échelles de temps ont été envisagés :
- Planification hors ligne [8]. Dans le cadre du projet il s’agit de pourvoir planifier l’enchaînement des tâches en fonction de la mission (comme l’un des scénarios préalablement réalisé). Pour ce faire, des méthodes basées sur la vérification de modèle ont permis de déterminer les différents comportements en fonction des connaissances spatiales et temporelles, déterminant un chemin optimal sur les modes de perceptions et de commande
- Supervision en temps réel (i.e durant l’exécution de la tâche) . La méthodologie mise en œuvre pour la sélection des comportements préalablement planifiée est généralisable en temps réel, en définissant les modes admissibles en fonction de l’espace et du temps. Aussi, pour chaque mode mis en œuvre, un indicateur a été créé pour définir l’état du comportement. De telles caractéristiques ont pu ainsi être intégrées dans une machine à état [9], où un arbre de décision, dépendant du scénario, a été implémenté.
Comme décrit dans les parties suivantes, si l’aspect sélection des modes a pu être mis en œuvre tant au niveau de la planification hors ligne que de la supervision en temps réel, il apparaît important de pouvoir disposer d’algorithmes permettant de plus grande latitude dans les possibilités de sélection, notamment en considérant les approches d’intelligence artificielle .
Gestion des Plate-formes matérielles et logicielles pour la validation.
Afin de concevoir un robot capable de reconfiguration le projet a mis en œuvre les méthodologies d’innovation et de conception permettant de satisfaire au cahier des charges issu de l’analyse de scénario établi dans la première phase du projet. En particulier les critères relatifs à la variation en temps réel des caractéristiques physiques d’un robot mobile que sont la voie, l’empattement, la garde au sol, la position du centre de gravité ont été analysés au travers des méthodes TRIZ/ARIZ [10]. Celles-ci ont amené à considérer qu’à la conception d’un unique robot pour les contraintes identifiées, pouvait se substituer l’association de plusieurs robots afin de pouvoir à la fois naviguer de façon autonome et sûre entre les rangs d’une parcelle, tout en pouvant l’enjamber (en portant de façon coordonnée un outil au-dessus du rang). Le projet s’est alors infléchit en développant, à la place d’un unique robot reconfigurable, un système robotique reconfigurable composé de plusieurs robots. Ceci permet de réduire la complexité et le coût de conception en la reportant sur les aspects de commande et de perception, avec l’ajout d’un comportement « association rapprochée de robot » (mode M9 – P8, suivant le tableau précédent).










Commentaires récents